机械手简介:
工业机器人在制造生产中的使用越来越广泛。在机器人技术的应用中,机器视觉系统发挥了举足轻重的作用。研发出的机械手
自动拾放系统高效灵活,被广泛应用于各个行业。
为了满足工艺要求,一般来说机械手必须是有以下三类。
1、平行球坐标机械手
这类机械手结构与凿岩台车类似,臂部由水平臂杆和支臂组成,有三个转动副和一个移动副,但只有三个自由度。由于采用了
自动平行机构,水平臂杆在升降过程中可以始终保持平行,这样形成的工作空间由部分球体和圆柱体组成。按支臂的运动方式,
又可以分成摆动式和回转式两种。
2、球坐标机械手
这类机械手没有水平臂杆,有支臂油缸伸缩、支臂上下摆动和绕垂轴转动等三个动作,工作空间是球体的一部分,结构简单,
工作范围较大。
3.关节型机械手
臂部由上下两根臂杆组成,根部绕垂直轴回转,三个自由度都是转动自由度,工作空间是球体的一部分,在行走和运输状态时
臂杆可以折叠、结构紧凑,工作范围大和动作灵活。

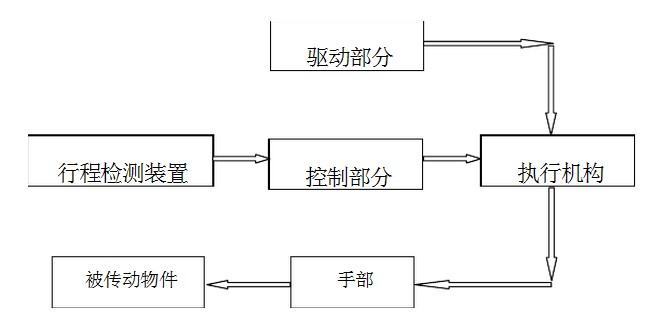
机械手的组成:
机械手主要由执行机构、驱动机构和控制机构三部分组成。其组成及相互关系如下图:
机械手的优点
节约人工、减轻工人的工作劳动力
安全性高
提高效率
稳定产量
提升品质
摆脱人工操作的惰性
回报快
提高竟争力、提升企业形象
机械手行业案例
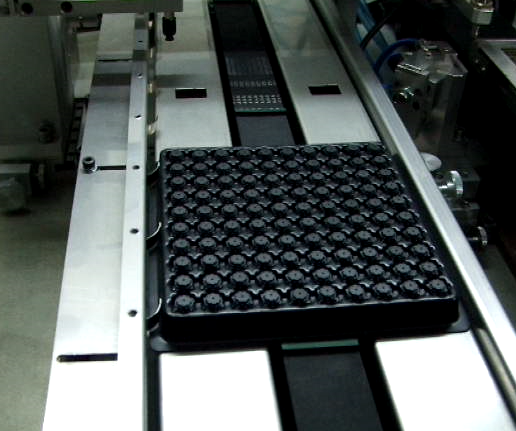
镜头盖组装机
手机镜头盖的组装,使用机械手1从矩阵式镜头盖料盒中把镜头盖取出,然后放到定位机构处,











 机械行业
机械行业